Under The Hood Of The PID Controller
Here’s a simplified block diagram of what the PID controller does:
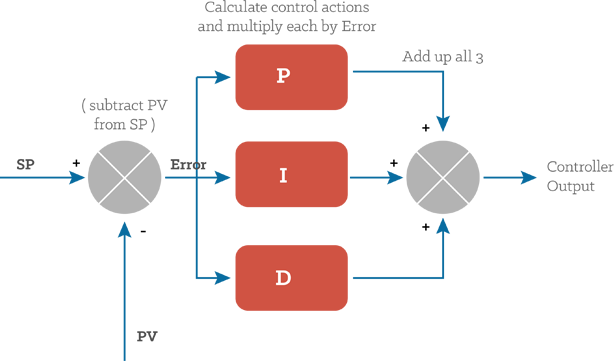
It is really very simple in operation. The PV is subtracted from the SP to create the Error. The error is simply multiplied by one, two or all of the calculated P, I and D actions (depending which ones are turned on). Then the resulting “error x control actions” are added together and sent to the controller output.
These 3 modes are used in different combinations:
P – Sometimes used
PI - Most often used
PID – Sometimes used
PD – rare as hen’s teeth but can be useful for controlling servomotors.
So let’s now get an intuitive feel for how each control action works. In other words let’s understand what goes on in the P, I and D boxes in the block diagram above.
To do this we will be using our analogy of driving a car on a motorway, and using the principles of PID control to move the car into another lane.
Proportional control
Here’s a diagram of the controller when we have enabled only P control:
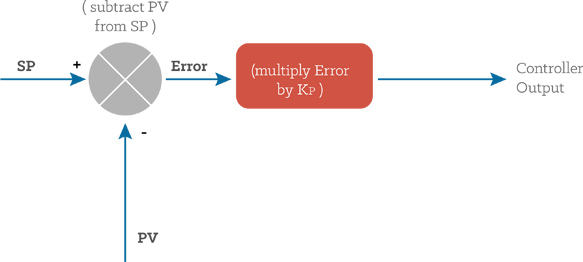
In Proportional Only mode, the controller simply multiplies the Error by the Proportional Gain (Kp) to get the controller output.
The Proportional Gain is the setting that we tune to get our desired performance from a “P only” controller.
We have already pointed out that driving a car with your eyes open is analogous to feedback control where you are the controller. To take this analogy further, think about when you change lanes on the motorway. Everything is instinctive of course, but if you analyse your actions the course of events goes something like this:
You have to first choose an initial steering angle (in reality you slowly increase the steering angle – but for the sake of this thought experiment – assume that you quickly turn the steering wheel to an immediate initial angle)
The car immediately starts to move towards the centre of the next lane. Now you don’t want to wait until you are in the centre of the next lane to start correcting your steering, so what you intuitively do is reduce the steering angle as you get closer to your target position in the next lane.
i.e. as your “position error” reduces, so does your “control action”. Refer to the diagram of the P-Only controller above if this is not intuitive to you: as the error reduces, so must the controller output.
So the safest approach to changing lane successfully is to start with a small angle and slowly reduce it as you get closer to the next lane.
The problem with this is that – if you are in a hurry to get into that lane and you choose a really conservative (i.e. small) angle initially, you will take a long time to get there.
It is the same with a proportional controller – a small proportional gain (Kp in the diagram) is the safest way to get to setpoint – but your controller performance will be slow.
Improving your lane changing performance
OK so you need to get into the outside lane before the approaching Porsche slams into your rear. You wrench the wheel to a really steep angle, and start correcting as you get closer, but , holy crap, the your momentum has taken you over the centre of the next lane and you are rapidly approaching the opposite side of the road. Because you are consistent (just as a PID controller is), you wrench the wheel in the opposite direction just as hard as before, and guess what, now you’ve over shot back to the other side of the lane. Before you know it you’ve gone unstable! You are in a vicious cycle of lurching from one side of the lane to the other and back again.
That’s why too much P gain in a control loop sends it unstable: the actuator doesn’t back off quick enough, you overshoot, and then make the exact same mistake going the other way, and on and on.
So the trick is to find a P gain that is high enough to give you the speed of response that you need, but not so high that you go unstable.
So why don’t all control loops use a P only controller that is beautifully tuned not to overshoot the setpoint and leave it at that?
The answer is “disturbances”.
Disturbances in a control loop require more that just P
Tomorrow: Overcoming Disturbances With Integral Action
I'll Give You All The Tools And Training You Need To Tune Your PID Loop - From Just $97
Click Here to Order
“Its power and utility is embedded in its simplicity.
Your Blueprint launched our process from ‘expect the worst, but hope for the best’ process to one that is reliable and predictable. ”